
WarpRunner THC
Price
WarpRunner THC
Product Description




WarpRunner THC, This is for High End Application
Overview
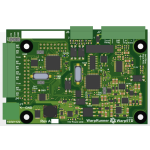
The WarpRunner is a Torch Height Controller that plugs on top of the ESS and commands velocity-based up and down moves for your Z axis to achieve the optimal cut based upon your settings. This is also a BOB (Break Out Board) that provides 8 additional outputs (for up to 4 motors or axes) and 2 additional 24V (or 12V) optoisolated inputs.
The WarpRunner samples the divided tip volts from your plasma unit over 187'000 times per second, and then using DSP filters that down to obtain a stable voltage which is used to command Z velocities to the SmoothStepper 2'000 times per second! This results in very responsive Z motion to help you achieve the best cut quality possible with your hardware and materials.
The WarpRunner uses the same software and core functionality of the TMC3in1, but has improved hardware features that address shortcomings of the TMC3in1:
- A smaller and cleaner profile
- More LEDs to show input states
- Inputs 1 and 2 now feed directly into the ESS's Port 3 so that they can be read when the WarpRunner is not powered
- Various circuit improvements
- Better silk screen labeling
- The main 24V (or 12V) power pins are reversed compared to the TMC3in1. However, a reversed voltage protection diode has been added.
You need to add a Ethernet board: Ethernet SmoothStepper Motion Control Board for Mach3 and Mach4, 6 Axis (with cables)
Mach4 Software: Fully Licensed versions of Mach4, Email you the license.
Officially the WarpRunner will only run with Mach4. You may use the TMC3in1 plugin to run the WarpRunner with Mach3, but we will not support it other than the Mach3 TMC3in1 documentation. It is not worth our time or your time to run the WarpRunner in Mach3, please believe us and use Mach4 and SheetCam with the WarpRunner.
Download:
Additional Details
 Updating...
Updating... 